联系我们
联系电话:021-36337417
QQ:6065788
微信:13817525788
机器视觉教学实训平台
- [名称]:机器视觉教学实训平台
- [规格型号]:DB-JQR16
- [产品价格]:
- [产品参数]:请联系客服
- [联系电话]:021-36334717
- [QQ]:

- 欢迎关注我公司产品
产品详情
一、平台概述
1、平台简介
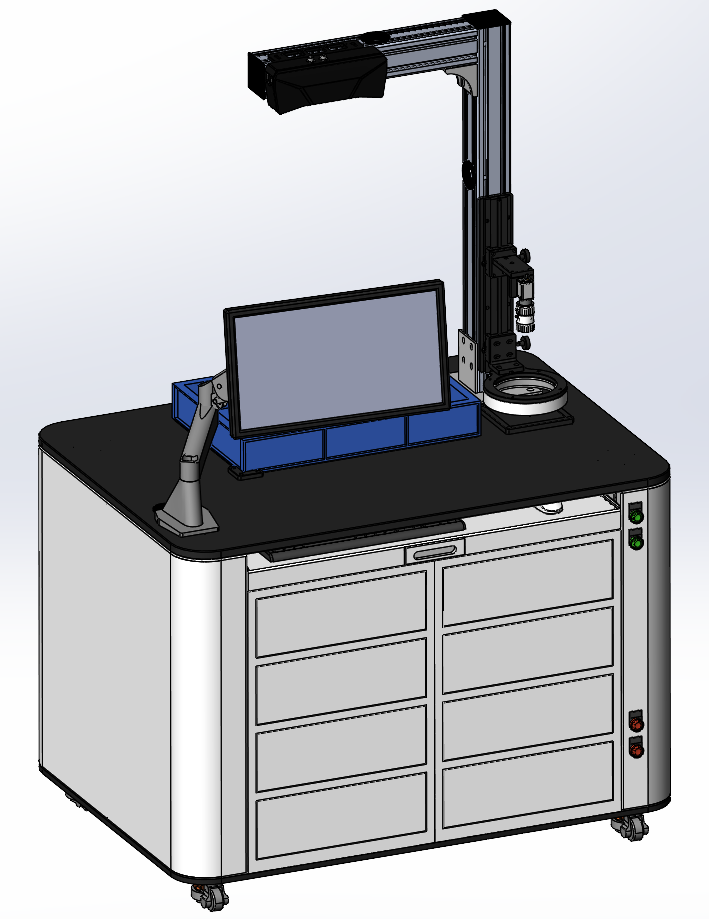
机器视觉教学实训平台是面向教育培训领域所设计的一款教学实训平台。
机器视觉教学实训平台基于3D智能相机和2D工业相机,搭配多种行业应用的真实工件和虚拟仿真的应用场景,融合3D视觉系统调试应用开发、2D视觉系统应用技术、图形化视觉处理技术、机器人离线编程与调试技术、深度学习等实训功能。
机器视觉教学实训平台提供配套完善的实训教材与培训视频,能满足视觉算法,软件,机械,电气以及机器人相关专业的学员,开展机器人从基础示教、离线编程、到复杂视觉应用开发等知识点的实验实训。
平台模型图")
2、技术参数
输入电源:单相三线220V±10% 50Hz
3D相机型号:proS 700C
2D相机型号:A3B00MG000
2D镜头型号:MFA121-U25
2D光源型号:CST-RS18030-B
工作环境:温度-10℃~+40℃
相对湿度≤85%(25℃)
平台尺寸:1170 x 830x 1700mm
安全保护:具有漏电保护,安全符合国家标准
3、视觉系统模块
(1)工业级3D相机
①智能程度高
基于先进的视觉算法,可处理各类工件以及纸箱、麻袋、货品等典型物体,轻松应对随意堆叠、无序放置、一定程度反光、暗色等复杂工况。
②稳定可靠
Mech-Eye工业级3D相机具备IP65防护等级,可在严苛的环境中稳定运行,且已通过CE、FCC、VCCI及RoHS认证。
③开放性强,部署简单高效
提供多语言、多平台的SDK选择,接口开放,部署简单。可选择搭配Mech-Vision、Mech-Viz使用,轻松、快速部署各类检测/量测应用。")
3D工业相机
(2)工业级2D相机
①结构紧凑,便于集成
尺寸为29mm*29mm*29mm,采用USB3.0数据接口,5Gbps理论传输宽带,USB 接口直接供电,支持软件触发、硬件触发、自由运行等多种模式。
②开放性强,便于拓展
兼容Windows及Linux操作系统,支持TWAIN和DirectShow接口,SDK开发包支持VC、VB、C#、Delphi、Labview等语言,支持对接Mech-Vision、Halcon、Labview、OpenCV、Matlab等第三方软件。")
2D工业相机
(3)图形化视觉处理软件
完全图形化的视觉软件,无需编写代码即可完成拆垛、无序工件上料等视觉应用。
内置3D视觉、深度学习等前沿算法模块,可满足复杂多样的应用需求。")
图形化视觉处理软件
(4)机器人智能编程软件
完全图形化的机器人智能编程环境,支持数字孪生。
内置轨迹规划、碰撞检测、混码等智能算法,适配国内外众多主流品牌机器人,如ABB、KUKA、FANUC、DENSO、UR、AUBO、JAKA等。")
机器人智能编程软件
(5)机器视觉深度学习平台软件
包括缺陷检测、分类、实例分割等功能,可对物体快速识别、定位、判断物体状态以及检测缺陷算法。
深度学习自主训练工具,将深度学习模型训练的数据采集、筛选、导入、标注、模型训练、验证及部署应用的过程进行全流程整合,方便自主操作,提升训练效率,并全程保证数据安全性。")
机器视觉深度学习工作流程
二、实训项目
该平台配备10多个实训项目的软硬件资源,包括工程、实训操作文档和培训视频等。
下文以纸箱拆码垛、电机转子上料、钢筋打标计数等应用场景为例做简单介绍。
1、纸箱拆码垛
该项目模拟实际工业场景的纸箱拆码垛。")
工作流程&应用场景:")
纸箱拆码垛工作流程&应用场景
2、电机转子上料
该项目模拟实际工业场景的电机转子上料。")
工作流程&应用场景:")
电机转子上料工作流程&应用场景
3、钢筋打标计数
该项目模拟实际工业场景的钢筋打标计数。")
工作流程&应用场景:")
钢筋打标计数工作流程&应用场景
7. 实训课程
平台可支撑和构建的课程,涵盖《3D视觉实操与应用技巧》、《AI+机器视觉典型应用案例实践》等。
《3D视觉实操与应用技巧》实训任务清单
项目1 安装3D视觉系统
任务1-1 机械安装
任务1-2 线缆安装
任务1-3 软件安装
项目2 采集3D相机的图像数据
任务2-1 连接相机
任务2-2 配置相机参数
任务2-3 保存数据
项目3 图像标注和深度学习模型训练
任务3-1 新建DLK工程
任务3-2 算法模块介绍
任务3-3 导入图像数据
任务3-4 数据集介绍
任务3-5 图像标注和模型训练
任务3-6 模型验证和模型应用
项目4 视觉主控烧录
任务4-1 主控烧录准备
任务4-2 主控烧录操作
任务4-3 主控移动控制机器人
项目5 相机外参标定
任务5-1 相机外参标定概述
任务5-2 标定前准备
任务5-3 采用多个随机标定板位姿方式的ETH标定
任务5-4 采用多个随机标定板位姿方式的EIH标定
任务5-5 采用TCP尖点触碰方式的ETH标定
任务5-6 采用TCP尖点触碰方式的EIH标定
项目6 制作点云模板和添加抓取点
任务6-1 点云模板和抓取点概述
任务6-2 生成点云模板
任务6-3 编辑点云模板
任务6-4 添加抓取点
任务6-5 保存点云模板和抓取点
项目7 搭建视觉工程
任务7-1 Mech-Vision软件的基本操作
任务7-2 常用步骤介绍
任务7-3 步骤组合介绍
任务7-4 工程实战——电机转子上料的Mech-Vision工程搭建
项目8 搭建机器人工程
任务8-1 Mech-Viz软件的基本操作
任务8-2 常用任务介绍
任务8-3 工程实战——电机转子上料的Mech-Viz工程搭建
项目9 3D视觉进阶功能
任务9-1 查看3D视觉软件版本
任务9-2 Mech-Vision典型应用工程介绍
任务9-3 Mech-Vision示例工程介绍
任务9-4 相机主控其它品牌机器人通讯
任务9-5 认识标准接口
任务9-6 3D视觉随机手册查阅
《AI+机器视觉典型应用案例实践》实训任务清单
项目1 学前准备
任务1-1 项目式教学概述
任务1-2 3D视觉典型应用工作站概述
任务1-3 学习资源概述
任务1-4 本书中典型应用工作站的使用注意事项
项目2 2D视觉典型应用——零部件缺陷检测
任务2-1 零部件缺陷检测工作站的功能需求
任务2-2 零部件缺陷检测工作站的系统实现流程
任务2-3 零部件缺陷检测工作站的DLK工程实现
任务2-4 零部件缺陷检测工作站的视觉工程实现
项目3 2D视觉典型应用——零部件尺寸测量
任务3-1 零部件尺寸测量工作站的功能需求
任务3-2 零部件尺寸测量工作站的系统实现流程
任务3-3 零部件尺寸测量工作站的视觉工程实现
项目4 3D视觉典型应用——纸箱拆码垛
任务4-1 纸箱拆码垛工作站的功能需求
任务4-2 纸箱拆码垛工作站的系统实现流程
任务4-3 纸箱拆码垛工作站的视觉功能实现
任务4-4 纸箱拆码垛工作站的运动规划功能实现
任务4-5 纸箱拆码垛工作站的使用注意事项
项目5 3D视觉典型应用——金属上下料
任务5-1 金属上下料工作站的功能需求
任务5-2 金属上下料工作站的系统实现流程
任务5-3 金属上下料工作站的视觉功能实现
任务5-4 金属上下料工作站的运动规划功能实现
任务5-5 金属上下料工作站的使用注意事项
项目6 3D视觉典型应用——钢筋打标计数
任务6-1 钢筋打标计数工作站的功能需求
任务6-2 钢筋打标计数工作站的系统实现流程
任务6-3 钢筋打标计数工作站的视觉功能实现
任务6-4 钢筋打标计数工作站的运动规划功能实现
任务6-5 钢筋打标计数工作站的使用注意事项
项目7 3D视觉典型应用——商超分拣
任务7-1 商超分拣工作站的功能需求
任务7-2 商超分拣工作站的系统实现流程
任务7-3 商超分拣工作站的视觉功能实现
任务7-4 商超分拣工作站的运动规划功能实现
任务7-5 商超分拣工作站的使用注意事项
项目8 3D视觉典型应用——钢板开坡口
任务8-1 钢板开坡口工作站的功能需求
任务8-2 钢板开坡口工作站的系统实现流程
任务8-3 钢板开坡口工作站的视觉功能实现
任务8-4 钢板开坡口工作站的运动规划功能实现
任务8-5 钢板开坡口工作站的使用注意事项
上一篇:工业机器人拆装实训装置
下一篇:工业4.0智慧工厂上下料实训装置
工业机器人实训设备最新产品
-

型号:DB-JQR07
价格:
-
型号:DB-JQR06
品名:工业机器人教学实训装置
价格:
-
型号:DB-JQR08
价格:
-
型号:DB-JQR09
品名:智能工业机器人实训平台
价格: